您當前的位置 :
您當前的位置 :
“巧手機器人”實現33種抓握動作,還能雙面抓握、自主爬行
发布:2026-01-21





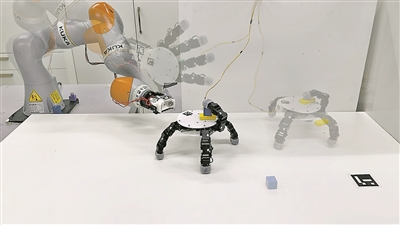
據《自然·通訊》20日發表的研究,一種“巧手機器人”不但能夠複現人類手部的33種抓握動作,還升級成具備雙面抓握與自主爬行能力的“高級手”。這一由洛桑聯邦理工學院(EPFL)研發的可拆卸機械手,能抓取超出常規尺寸範圍的物體,並能連續處理多個目標,在工業自動化、服務協助及野外勘探等領域具有極大應用價值。
在機器人學領域,機械手的設計長期受到人類手部結構的啟發。儘管人手極為靈巧,但受到非對稱形態與單面抓握的物理局限,限制了其在狹窄空間作業、多物體同步操作等場景下的效能。為突破這些限制,工程師近年來不斷探索對稱結構、模組化及可重構的機械手設計方案。
在這項工作中,團隊開發了兩種對稱結構的機械手:五指版本與六指版本,手掌直徑均為16釐米。對稱設計使其能夠從雙面進行抓握,顯著增強了操作的靈活性與適應性。該機械手的另一個突出特點是可與機械臂基座分離,通過內置驅動實現自主爬行移動。
研究團隊演示了“巧手機器人”連續抓取最多3個不同物體的能力,並能在抓持物體的狀態下,穩定地重新與機械臂對接。實驗顯示,該設備能夠可靠抓取多種日常物品,如捲筒芯、橡膠筆、罐頭與橡膠球,並能複現人類手部的數十種典型抓握姿態,最大負載可達2公斤。
這類可脫離基座、具備移動能力的機械手,代表了一種向“機器人即服務”及柔性製造系統演進的技術方向。其可拆卸與重新配置的特性,為在複雜、非結構化環境中執行任務提供了新思路,例如在災難救援中進入廢墟縫隙進行操作,或在倉儲物流中同時處理多個異形包裹。未來的研究可進一步探索其在動態環境中的自主決策與協同作業能力,推動機器人系統向更智能、更適應多變場景的方向發展。
來源:中國科技日報