您當前的位置 :
您當前的位置 : 




11 月 11 日消息,德國維爾茨堡大學(JMU)11 月 7 日宣佈,該校研究團隊在軌完成了全球首次由 AI 自主控制的衛星姿態調整實驗,標誌著航太系統自主化的重要里程碑。
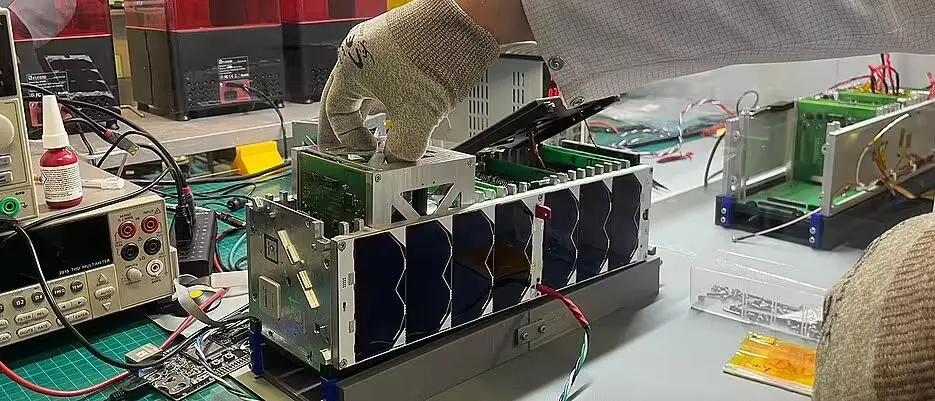
此次測試由該校“學習型姿態控制在軌驗證專案”(LeLaR)團隊執行,實驗平臺為一顆名為 InnoCube 的 3U 級納米衛星。
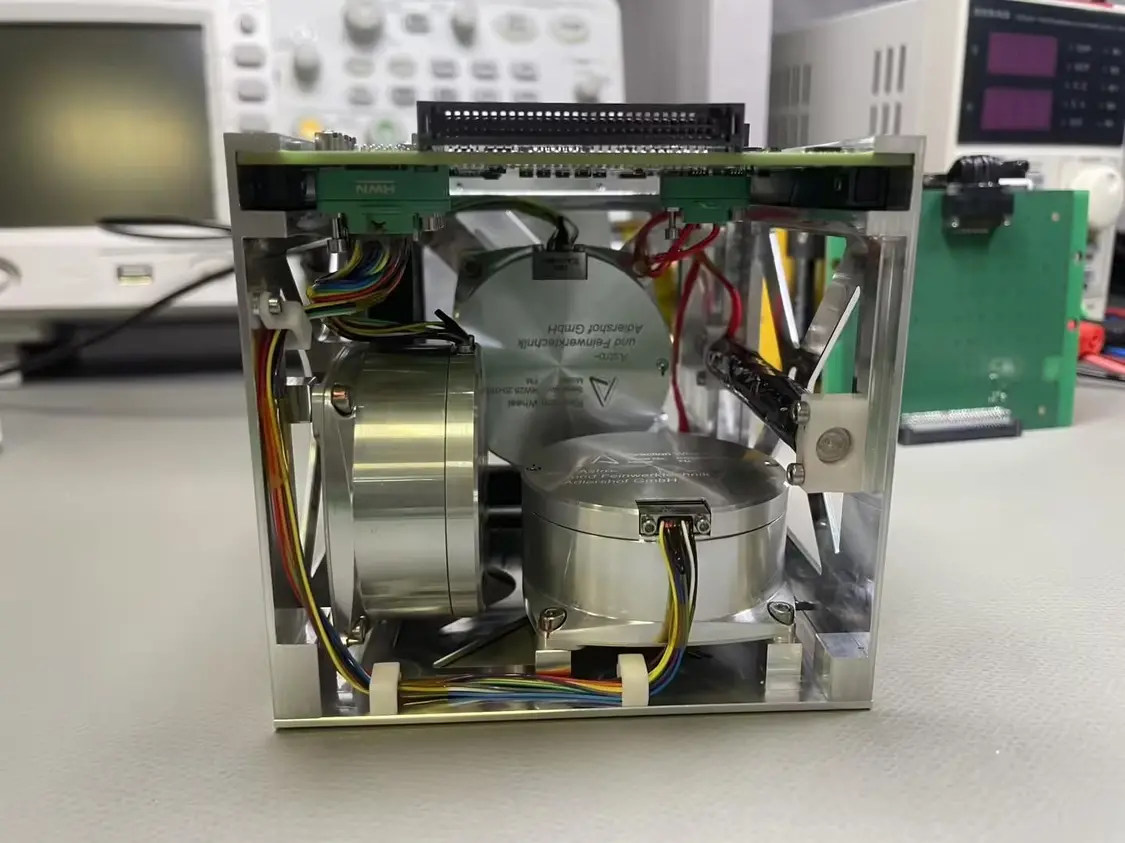
2025 年 10 月 30 日歐洲中部時間上午 11 時 40 分至 11 時 49 分之間,AI 控制器成功地利用反作用飛輪將衛星從初始姿態調整至預設目標姿態,整個過程完全由人工智慧在軌自主完成。此後在多次測試中,AI 也均能穩定地控制衛星指向目標方向。
專案與技術背景
LeLaR 專案全稱為“學習型姿態控制在軌演示”(In-Orbit Demonstrator for Learning Attitude Control),目標是研發新一代自主衛星姿態控制系統。姿態控制器用於穩定衛星姿態、防止其在軌翻滾,並確保其相機、感測器或天線對準指定目標。
不同於傳統依賴固定演算法的控制方式,JMU 團隊採用了深度強化學習(Deep Reinforcement Learning,簡稱 DRL)方法,這是一種通過神經網路在模擬環境中自主學習最優控制策略的 AI 技術。
相比傳統方法,DRL 在開發效率和適應性方面具有顯著優勢,可大幅減少 AI 調試時間,並能根據實際環境的變化自動調整控制策略,從而避免冗長的重新校準過程。
實驗突破與意義
研究人員先在地面高保真模擬環境中對 AI 控制器進行訓練,隨後將其上傳至衛星在軌驗證。專案中的一大技術挑戰是解決“仿真到現實差距”—— 確保在模擬中訓練的控制演算法能夠在真實太空環境中有效運行。
專案負責人基裏爾・傑布科博士(Dr. Kirill Djebko)表示:“我們實現了全球首次基於深度強化學習的衛星姿態控制器在軌成功運行的實證。”
團隊成員湯姆・鮑曼(Tom Baumann)補充道:“這項成功標誌著未來衛星控制系統邁出了關鍵一步,證明人工智慧不僅能在模擬中表現良好,也能在實際太空環境中安全執行自主機動。”
推動太空任務自主化
該專案的成功展示了人工智慧在航太安全關鍵任務中的可靠性。研究團隊認為,這將有助於提升航空航太領域對 AI 方法的接受度,並為未來的自主太空任務奠定信任基礎。
團隊成員弗蘭克・普佩教授(Professor Frank Puppe)指出:“這一成果將顯著提高 AI 技術在航空航太研究中的認可度。”
AI 控制方法在深空探測任務中具有潛在應用價值,尤其是在通信延遲或無法人工干預的環境中,自主學習型控制系統可能成為航天器生存和任務執行的關鍵。
未來展望
LeLaR 專案研究員埃裏克・迪爾格(Erik Dilger)表示,團隊計畫將該技術拓展至更多在軌場景。此次實驗所用的 InnoCube 衛星由維爾茨堡大學與柏林工業大學(TU Berlin)聯合開發,旨在為創新航太技術提供在軌測試平臺。記者注意到,該衛星還配備了名為 SKITH(Skip The Harness)的無線衛星匯流排系統,用無線數據傳輸取代傳統佈線,以減少品質並降低潛在故障風險。
研究團隊認為,這一成果為未來智能化、自適應、自學習的衛星控制系統奠定了基礎。專案負責人塞爾吉奧・蒙特內格羅教授(Professor Sergio Montenegro)總結道:“這是一大步,標誌著我們正在進入衛星控制系統的新階段 —— 智能、靈活且具備自學習能力。”
來源:中國IT之家